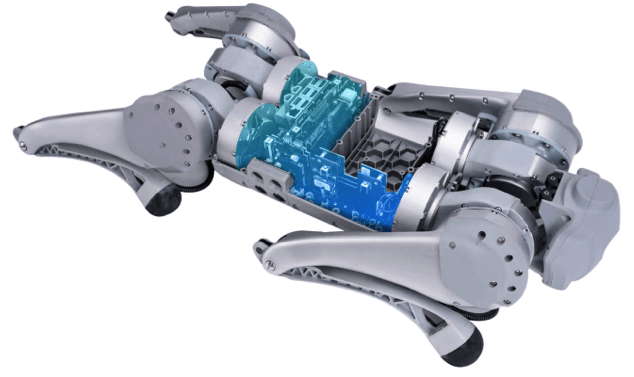
1) For the first time in human history, from 2013 to 2015, the quadruped robot (XDog). with full freedom, high performance and low cost driven by an external rotor brushless motor was realized.
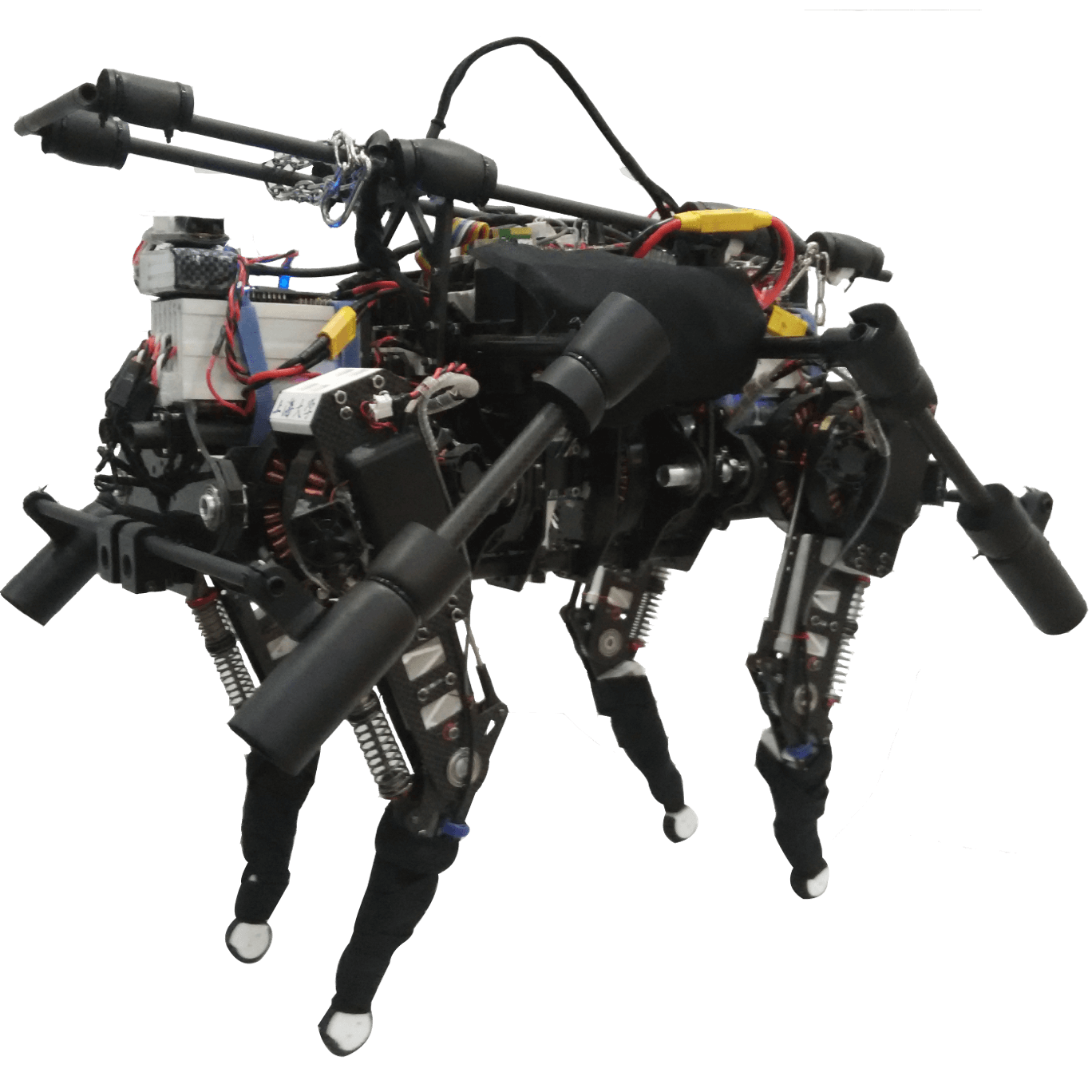
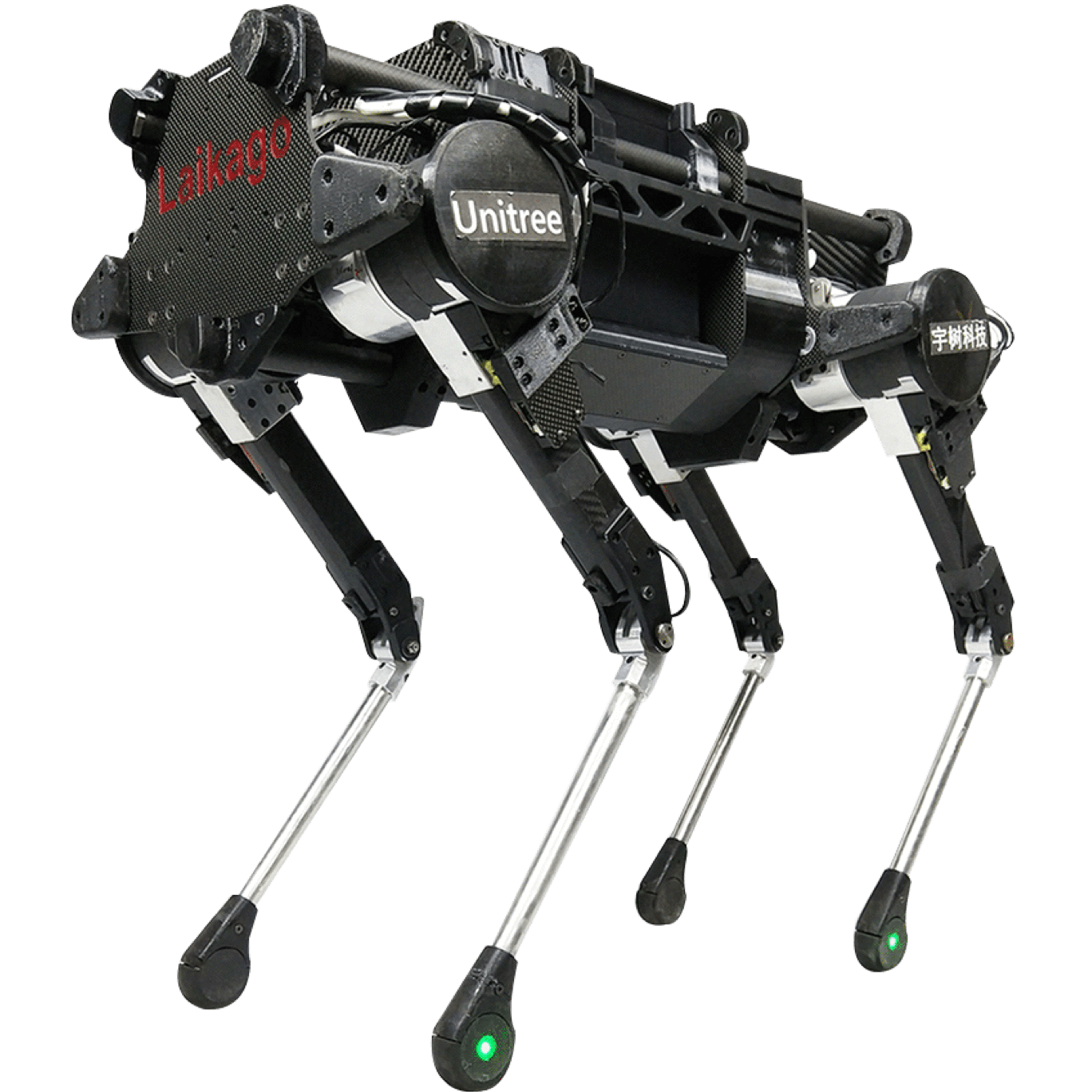
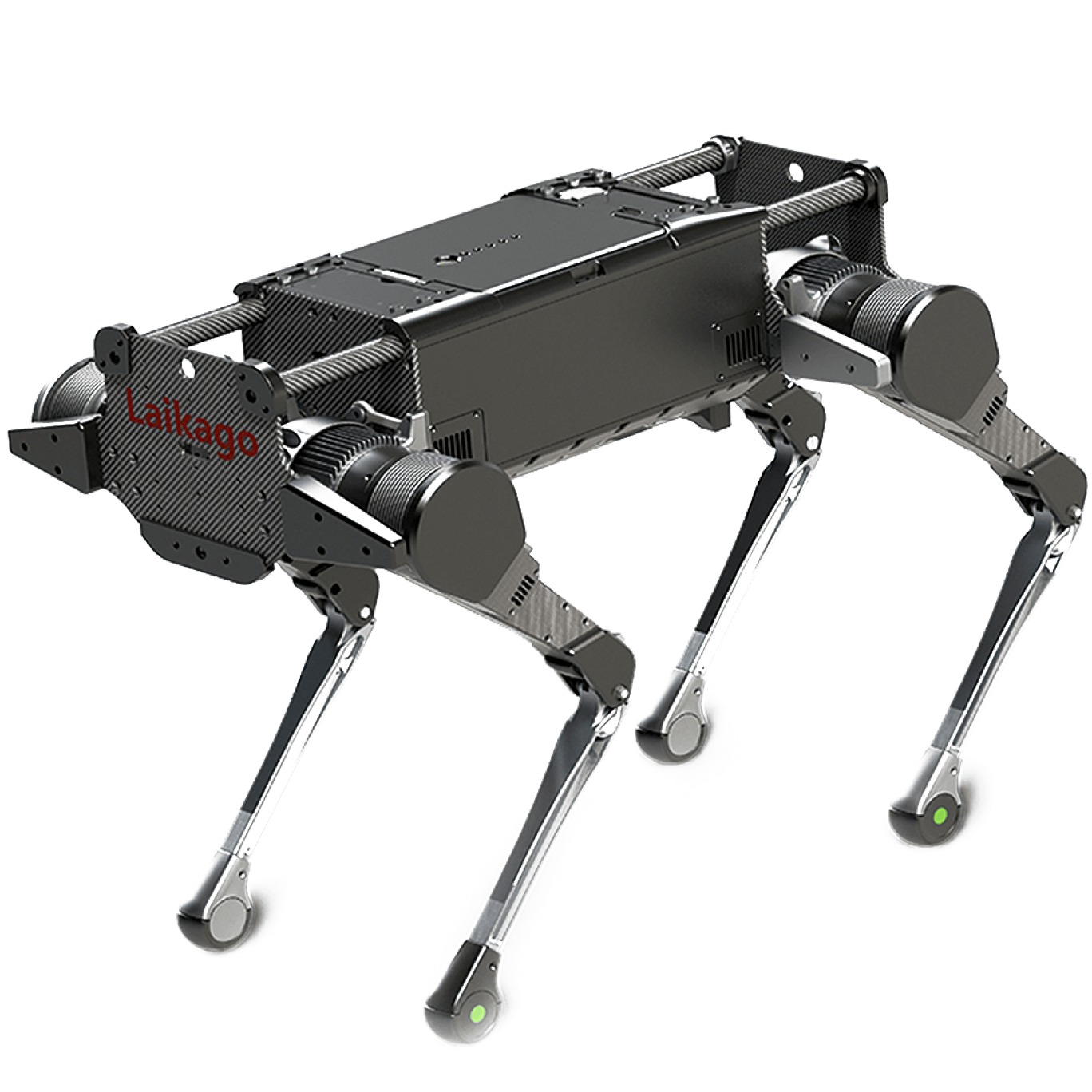
The World's First Intelligence Bionic Quadruped Robot Companion of Consumer Level
High Dynamics 17km/h
ISS Smart Concomitant
SSS Super-sensing 10-view Detection
AI Detection, Human Recognition, etc.
Flexible and Adaptive Joints
Long Endurance
SSS Super-sensing Viewing Angle Coverage









The robot is in the person's lateral peripheral vision, it is better than the conventional follow mode with natural human-computer interaction, safe and secure.
No need to always look back and worry about whether the robot is lost or encounters obstacles.
When the environment is complex, people can actively choose a simpler route to help the robot pass.
The new patented design of ultra-lightweight low-noise long-life power joints.
Body/Thigh Joint C1-8: 520g 23.70N.m (MAX).
Knee Joint C1-8×1.5 ratio 35.55N.m (MAX).
A patented heat pipe-assisted heat dissipation system is built into the vicinity of the knee joint motor.
Reference, NVIDIA TX2 only has CPU (4 cores) + GPU (256Core, 1.3TFLOPS), and the unit price of the chip is 3000+ RMB.
Hight Dynamics
Break the World Record (approximate specifications)
MaxSpeed=2.0/0.425≈4.7m/s (17km/h)


SSS 1 Super-sensing System
1 pair
Sensing Calculation
1*(4*1.43GHz 128Core0.5T)
ISS 1 Intelligent Concomitant
RTT 1 Pictures Transaction
Charger
24V,4A
Remote Control
Load
≈4kg(limit ~ 10kg)
Heat Pipe Assisted Heat Dissipation
Motion Speed
0 ~ 2.5m/s
Silver alloy precision joint motor
12 piece
Large joint movement space
body: -49~49°
thigh: -39~257°
shank: -161~-51°
Aluminum thigh
Battery
1 piece
Graphical Programming Interface(provide later)
Scientific Programming Interface
/
Python Programming Interface
/
HAI 1 Human Sensing
/
APP God View
/
4G
/
Foot-end Physical Force Sensor
/
Multifunctional Peripheral Expansion Interface
/
Radar
/
Warranty Period
6 months (core components)
3 months (non-core components)
Price(Tax and freight excluded)
$2700