Excellent Stability
Advanced dynamic balancing algorithm that allows A1 to meet impacts,
emergencies such as falls can quickly regain balance.
emergencies such as falls can quickly regain balance.
Multi camera intelligent depth camera
Active infrared stereo depth technology
The depth distance is 0.3 to 10 meters
1080P camera resolution
Error accuracy within 2 meters is less than 2%
Flexible, Create Endless Possibilities
Excellent Athletic
Performance
Reliable
and Stable
Multi-view Intelligent
Depth Camera
Real-time HD
video Transmission
Patented
Powertrain
Human
Concomitant
Dynamic Obstacle
Avoidance
Visual
SLAM
Gesture
Recognition
Secondary
Development
Joint torque: 33.5NM. (MAX)
Maximum joint speed: 21rad/s.
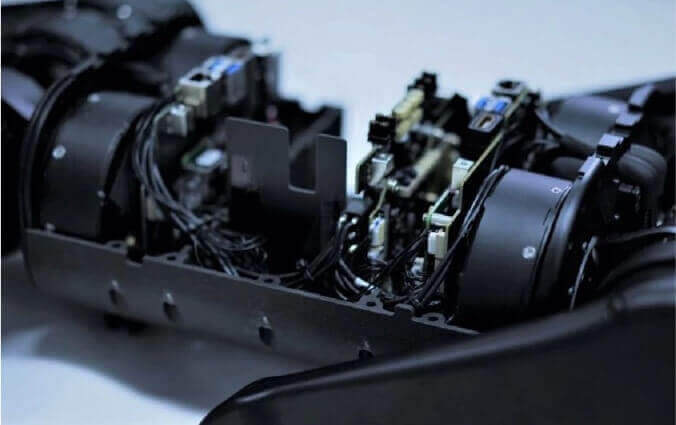
Joints support quick removal and easy maintenance.
Industrial grade cross roller bearings for long life and axial shock resistance.
Read all sensor data.
Position, speed, and torque commands can be sent to each motor separately.
Accurate access to foot support information is more reliable, efficient, and convenient.
HDMI x 2, Ethernet port x 2 USB x 4
Maximum continuous running speed 3.3m/s (11.88km/h).
The fastest and most stable small and medium-sized quadruped robot in China. (World record: 3.7m/s, achieved by MIT on a treadmill).
The speed of 3.3m/s is close to adult jogging and can be used as a running partner.

High-strength and lightweight body structure, simple and convenient maintenance
24V external power input interface, 5V, 12V, 19V external output power supply,
easy to connect to external expansion devices
Standard high-performance on-board dual master control (perception master and motion master).
External interface: 4 USB, 2 HDMI, 2 Ethernet ports.
Standard RealSense depth camera, building + obstacle avoidance.
The integrated force sensor at each foot end is convenient for the robot to perceive the contact state of the foot end in real-time in any state of motion.
Hardware force sensors and motor current sense of foot end force are integrated into the program, for better sensitivity and reliability.
The foot end is waterproof and dustproof, and it is easy to replace.

Follow targets (people, specific moving objects) in the visual range in real-time.
High real-time follow-up, video traffic refresh speeds up to 25-30 frames/s.
Support online learning of following target characteristics with good robustness performance.
The real-time confidence level of the tracking target is displayed by adjusting the color of the tracking box (green→ red, 100%→0%).

Dodge obstacles within 0 .8m of the robot's viewing angle.
The distribution of obstacles within the robot's viewing angle can be monitored in real time and the position of the fuselage can be adjusted.
Real-time display of the adjustment angle of the robot fuselage, the maximum distance and area within the viewing angle, and the range of the upcoming walking trajectory.

Deeply engaged in the field of four-legged robots for more than 6 years.
At the 2020CES, single set A1 successfully demonstrated more than 80 backflips in a row.
Closed-loop flip algorithm is adopted to ensure motion stability.


* This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
* Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.